

演示裝置的剖面圖顯示不同角度編碼器的位置。
為什么市場(chǎng)上有如此多的不同角度編碼器?為什么使用不同的掃描和測(cè)量方式?設(shè)計(jì)工程師應(yīng)選擇哪一種解決方案?海德漢的演示裝置通過(guò)選用四種不同角度編碼器,明確地回答這些問(wèn)題。
演示裝置十分簡(jiǎn)單:四個(gè)不同的角度編碼器安裝在ETEL的TMB+力矩電機(jī)上:
a.海德漢RCN 8311絕對(duì)式角度編碼器是一款典型的封閉式角度編碼器,用于精密機(jī)床的回轉(zhuǎn)工作臺(tái)和擺動(dòng)銑頭
b.海德漢ECA 4410絕對(duì)式角度編碼器是一款典型的鋼鼓模塊型角度編碼器,用于精密機(jī)床的大直徑軸回轉(zhuǎn)工作臺(tái)和擺動(dòng)銑頭。
c.海德漢ECM 2410絕對(duì)式磁柵編碼器是一款耐污性能優(yōu)異的模塊型角度編碼器
d.AMO的WMxA 1010編碼器是一款典型的鋼帶版絕對(duì)式感應(yīng)編碼器,用于對(duì)緊湊型、抗污性能要求高并需要靈活安裝的應(yīng)用。
演示裝置采用海德漢TNC 640數(shù)控系統(tǒng),仿真各角度編碼器的定位運(yùn)動(dòng),分析信號(hào)質(zhì)量對(duì)動(dòng)態(tài)性能的影響和測(cè)量原理對(duì)精度的影響。演示裝置還能顯示智能地使用整個(gè)系統(tǒng)數(shù)據(jù)提高工藝可靠性的潛力,整個(gè)系統(tǒng)包括電機(jī)、角度編碼器和傳感器連接盒。
信號(hào)質(zhì)量:決定表面質(zhì)量的重要因素
在直驅(qū)電機(jī)中,編碼器的信號(hào)質(zhì)量直接關(guān)系到電流噪音的大小,因此顯著影響動(dòng)態(tài)性能潛力和增加電機(jī)的功率損失。噪音是細(xì)分誤差的負(fù)效應(yīng),影響運(yùn)動(dòng)軸的動(dòng)態(tài)性能潛力。細(xì)分誤差導(dǎo)致位置值快速變化和速度計(jì)算誤差。反過(guò)來(lái)又進(jìn)一步加大電流噪音。為避免驅(qū)動(dòng)系統(tǒng)不穩(wěn)定,只能減小控制環(huán)增益,降低動(dòng)態(tài)性能,才能抵消噪音的加大。
噪音還影響電機(jī)的溫度特性。噪音低可降低功率損失,進(jìn)而降低電機(jī)溫度,相反,噪音大,增加電機(jī)功率消耗,因此顯著增加電機(jī)溫度。
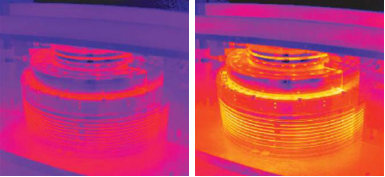
電機(jī)的溫度特性:左圖為溫度分布圖,由該圖可見(jiàn)位置控制環(huán)采用光學(xué)掃描角度編碼器時(shí)的電機(jī)溫度較低。非光學(xué)掃描的角度編碼器導(dǎo)致溫度較高,如右圖所示。
在比較不同編碼器中,明顯可見(jiàn)溫度特性的不同。光學(xué)編碼器噪音小且保持穩(wěn)定,而磁柵和感應(yīng)式編碼器的噪音較大,非均勻噪音較大,使用低通濾波器后噪音也依然較大。因此,光學(xué)編碼器是電機(jī)達(dá)到高性能和達(dá)到高表面質(zhì)量的理想選擇。
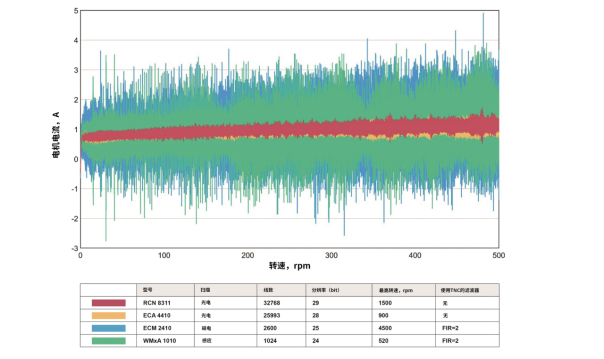
演示裝置中不同角度編碼器的噪音比較。
實(shí)際位置與理論位置
根據(jù)ISO 230-2標(biāo)準(zhǔn),測(cè)量回轉(zhuǎn)工作臺(tái)的定位精度,以此評(píng)估回轉(zhuǎn)工作臺(tái)實(shí)際位置與理論位置間的相符程度。為此,將回轉(zhuǎn)工作臺(tái)進(jìn)行五次順時(shí)針和五次逆時(shí)針回轉(zhuǎn),每圈測(cè)量十二個(gè)點(diǎn),相鄰測(cè)量點(diǎn)間相距30°。
評(píng)估編碼器的主要指標(biāo)是參數(shù)A,即定位運(yùn)動(dòng)的雙向精度,參數(shù)M,也即平均雙向定位偏差的范圍。參數(shù)A相當(dāng)于角度編碼器的系統(tǒng)精度和參數(shù)M相當(dāng)于分度精度,這兩個(gè)參數(shù)都考慮應(yīng)用誤差。
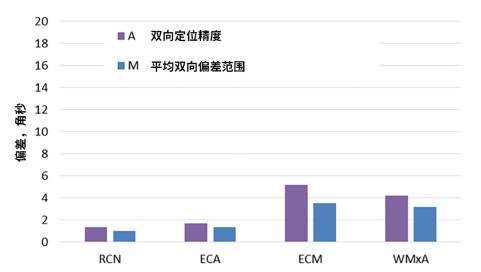
雙向定位精度和平均雙向定位偏差范圍:RCN和ECA光學(xué)角度編碼器的實(shí)際位置與理想位置之間的偏差明顯小于磁柵(ECM)和感應(yīng)式(WMxA)角度編碼器的偏差。
要在指定的最高運(yùn)動(dòng)速度下評(píng)估可達(dá)到的輪廓精度,海德漢的精度指標(biāo)不僅包括ISO 230-2標(biāo)準(zhǔn)要求,還包括動(dòng)態(tài)定位精度(由字母D表示)。根據(jù)ISO 230-2標(biāo)準(zhǔn),回轉(zhuǎn)工作臺(tái)順時(shí)針旋轉(zhuǎn)五圈,逆時(shí)針旋轉(zhuǎn)五圈,再次進(jìn)行測(cè)量。但是這次,用5 kHz的連續(xù)掃描頻率和20 rpm的旋轉(zhuǎn)速度進(jìn)行測(cè)量。
用可達(dá)到的輪廓精度測(cè)量動(dòng)態(tài)位置精度,從中可見(jiàn)WMxA感應(yīng)式角度編碼器的偏差較大。這種偏差的原因在于感應(yīng)掃描方式導(dǎo)致精度隨轉(zhuǎn)速而變化。相反,RCN和ECA光學(xué)編碼器與其完全不同,在理論位置與實(shí)際位置之間幾乎沒(méi)有偏差。ECM磁柵編碼器沒(méi)有嚴(yán)重偏差,性能居中。
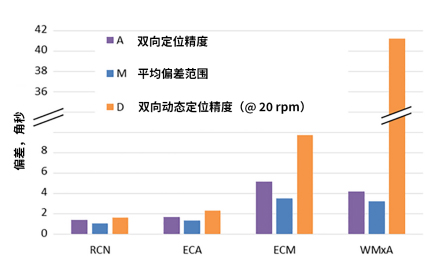
動(dòng)態(tài)定位精度是可達(dá)到的輪廓精度參數(shù)之一,感應(yīng)式角度編碼器的偏差較大。
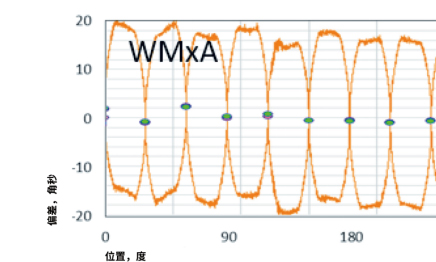
偏差較大的原因在于感應(yīng)掃描方式本身,其精度與轉(zhuǎn)速相關(guān),順時(shí)針與逆時(shí)針測(cè)量之間存在嚴(yán)重跳躍。
智能電機(jī)保護(hù),提高加工過(guò)程可靠性
力矩電機(jī),例如演示裝置中使用的ETEL電機(jī),不僅結(jié)構(gòu)緊湊而且性能卓越。但是,在部分加工條件下,如果繞組中的電流不對(duì)稱分布,溫度可能過(guò)高,導(dǎo)致一組繞組的溫度突然升高。將位于應(yīng)用附近的溫度傳感器的溫度數(shù)據(jù)數(shù)字化,并將溫度數(shù)據(jù)提供給數(shù)控系統(tǒng),智能地保護(hù)電機(jī),提高過(guò)程可靠性。特別是溫度信息可用性的改善有效提高加工過(guò)程可靠性和工作效率。
海德漢EIB 5200傳感器連接盒監(jiān)測(cè)電機(jī)的全部三組繞組,提供溫度數(shù)據(jù)并使其立即使用。連接盒位于電機(jī)附近,處在角度編碼器與機(jī)床數(shù)控系統(tǒng)之間。如果已經(jīng)確定和保存了電機(jī)的溫度模型,例如ETEL力矩電機(jī),這款傳感器連接盒可以快速發(fā)現(xiàn)溫度的突然上升,因此能避免電機(jī)繞組損壞和保護(hù)電機(jī),避免過(guò)熱。

在加工過(guò)程中,海德漢EIB 5200傳感器連接盒智能地保護(hù)電機(jī)。電纜連接簡(jiǎn)潔和電機(jī)系統(tǒng)的附加數(shù)據(jù)立即可用。
選擇正確的編碼器和智能地使用在加工過(guò)程中可用的不同數(shù)據(jù)關(guān)系到加工過(guò)程的可靠性、穩(wěn)定性和精度。確定不同型號(hào)編碼器所特有的工作特性能幫助設(shè)計(jì)工程師和開(kāi)發(fā)人員選擇正確的角度編碼器,滿足應(yīng)用要求。最后,選擇正確編碼器不僅關(guān)系到動(dòng)態(tài)性能和精度,設(shè)計(jì)工程師和開(kāi)發(fā)人員也必須考慮相關(guān)因素,例如轉(zhuǎn)軸直徑和安裝方式,當(dāng)然也必須考慮經(jīng)濟(jì)性。



